Pojazd sterowany – TSOP23xx
Pan Przemek uporał się z płynnym sterowaniem pojazdu (naprawa softu) – auto śmiga teraz całkiem gładko! Koła nie są uruchamiane i zatrzymywane na określony czas po wciśnięciu danego przycisku – brak efektu „czkawki”. Zamiast tego, auto zatrzymuje się gdy użytkownik zwolni przycisk na pilocie. Obsługiwane są też kody repetycji przycisku, w tym także tajemniczy kod ZERO – który pojawiał się na skutek jakiś problemów komunikacji pilota z czujką TSOP. Można więc się cieszyć, choć pilot płata figle i… mimo wszystko zrywa się komunikacja – wówczas auto się zatrzymuje (na chwilę, bo w końcu przycisk cały czas jest wciśnięty więc po chwili auto rusza). śmiało można to nazwać sukcesem. Niestety – testowy pojazd jest kiepski – 4 koła mają różne silniczki i jeden z nich działa zdecydowanie słabiej niż reszta, przez co auto marnie jeździ po podłodze (wykładzina = duże tarcie, trefne koło stoi w miejscu zamiast się kręcić). Będzie trzeba zmienić platformę (na zmodyfikowane serwomechanizmy – ale o tym za tydzień). Za tydzień też zastosowanie tej części kodu w komunikacji radiowej (lepszej niż na podczerwień).Precyzyjna Maszyna (PM2D3D) – soft
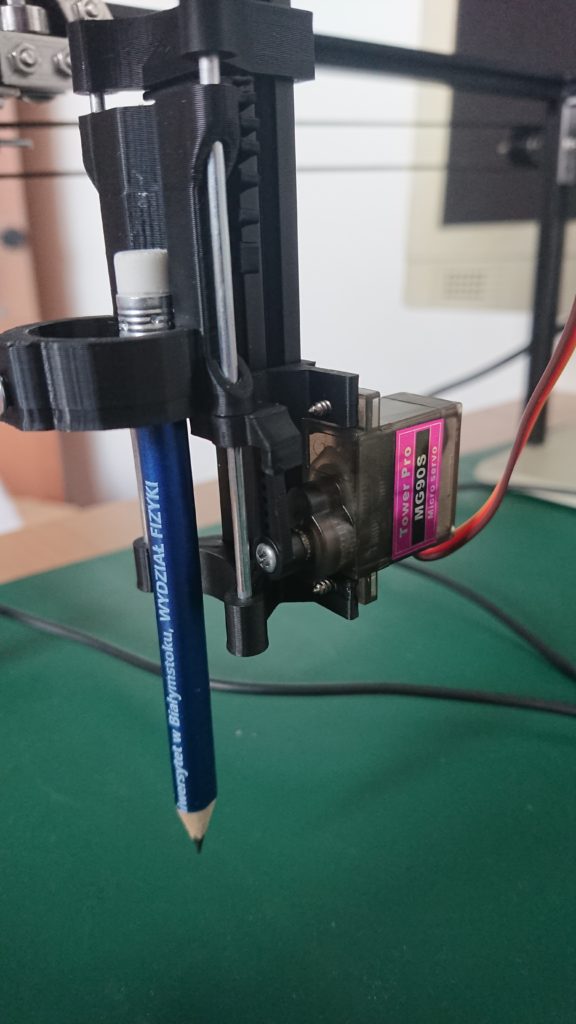
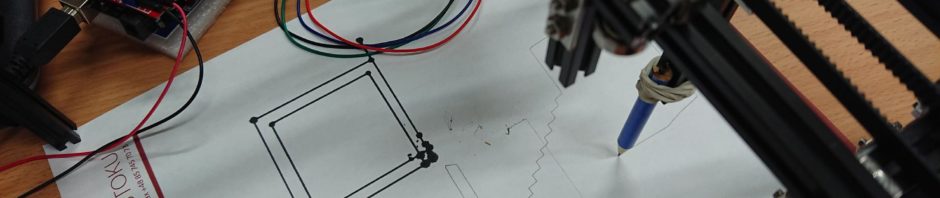
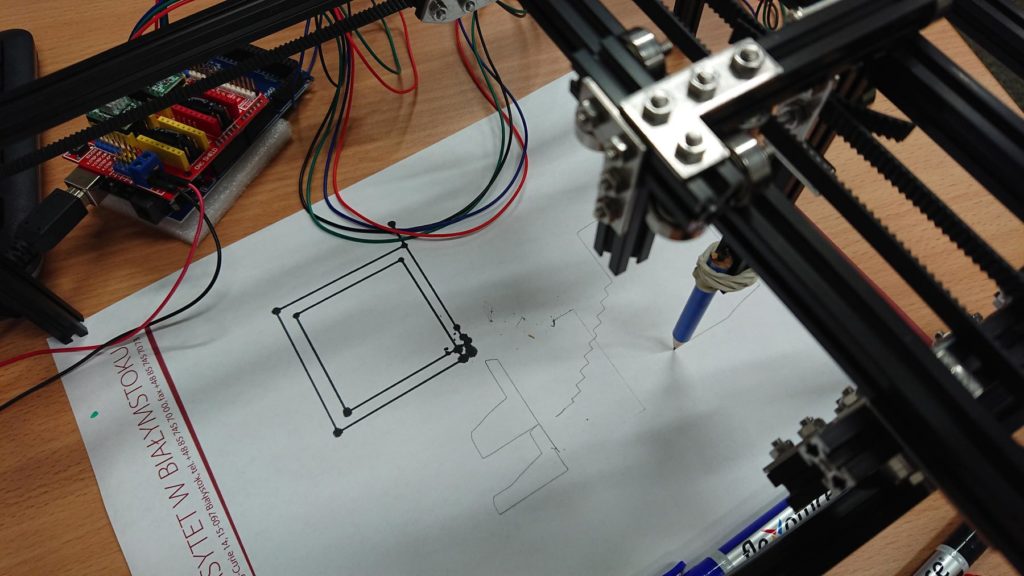
Kolejne prace nad softem, wydruk wydaje się zachęcający 😉 Z poziomu GRAPH CREATORA można już tworzyć grafikę, która zostanie przeniesiona na kartkę papieru. Brawo!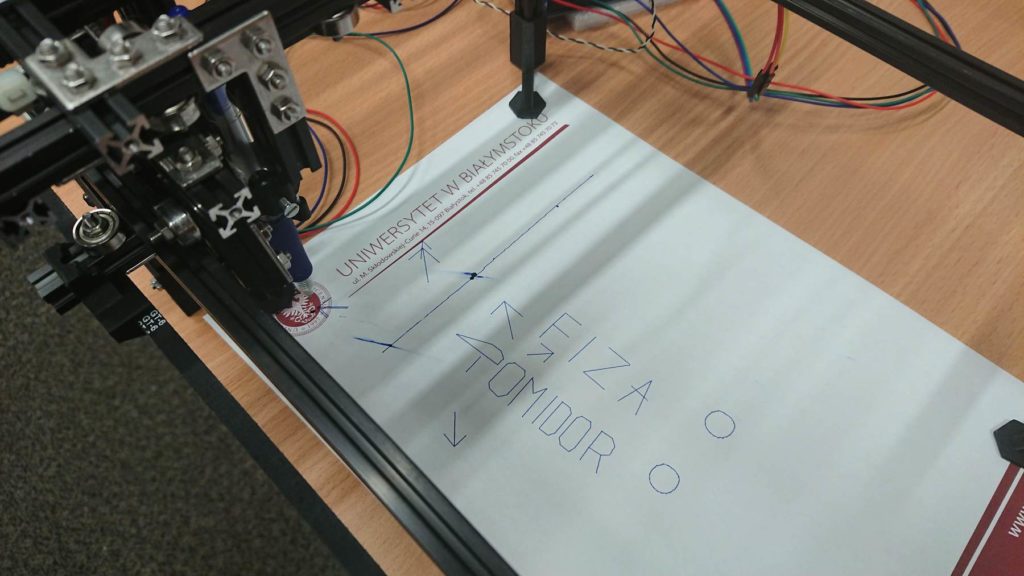 Więcej o projekcie Maszyny na stronie projektu.
Więcej o projekcie Maszyny na stronie projektu.
(c) K.G.
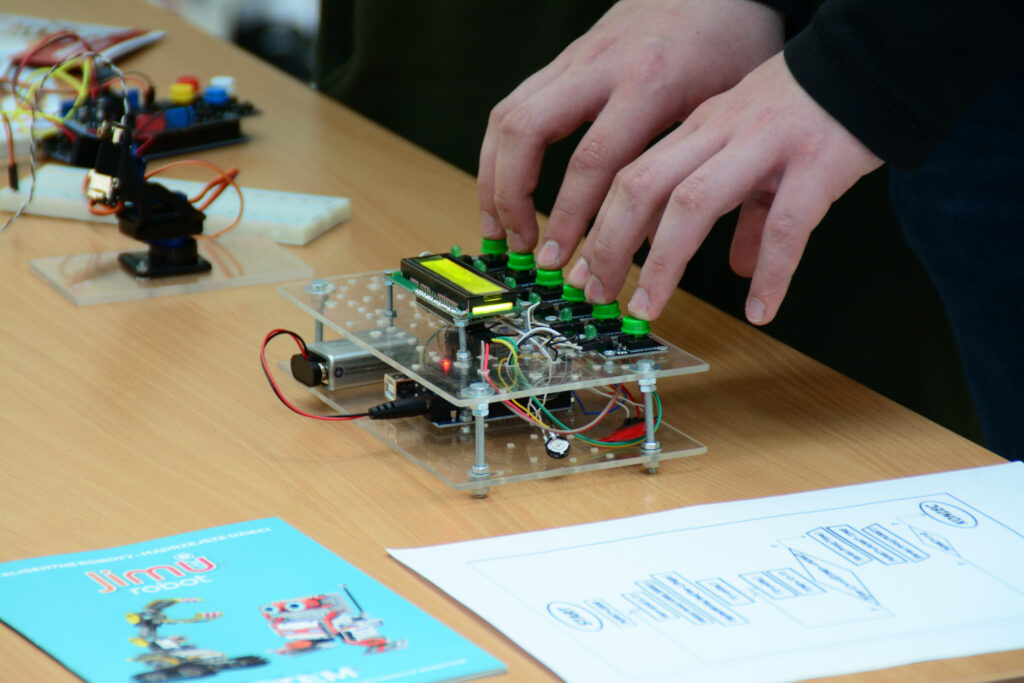
 Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
 Więcej o projekcie Maszyny na
Więcej o projekcie Maszyny na 
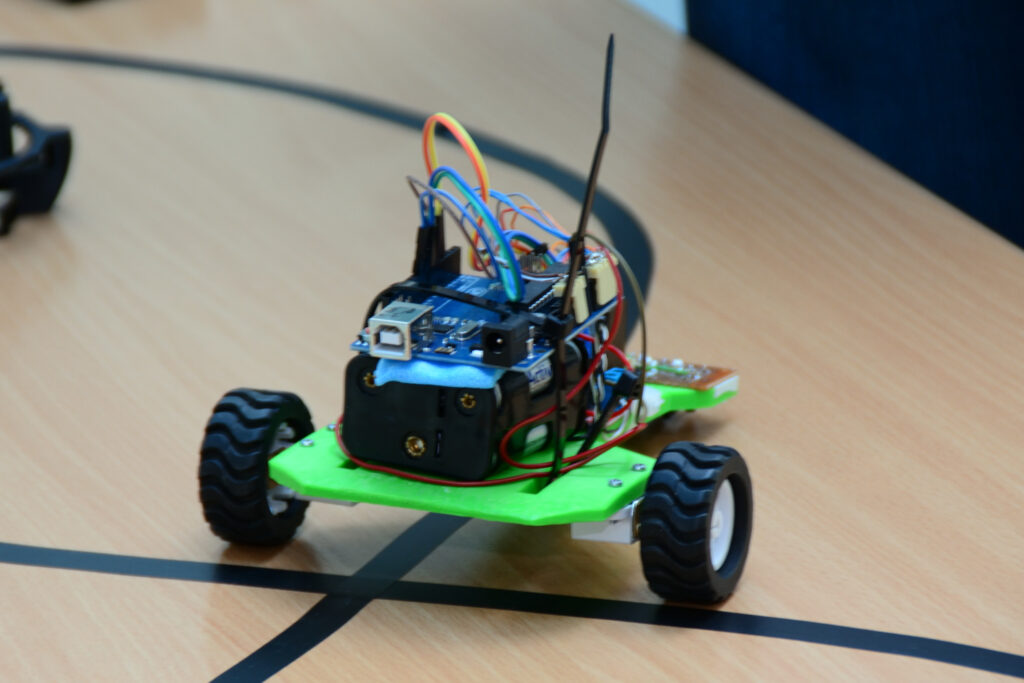
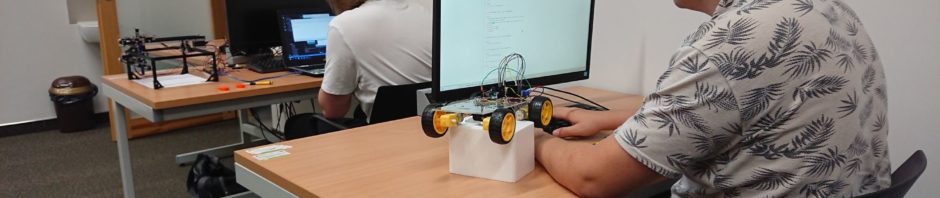
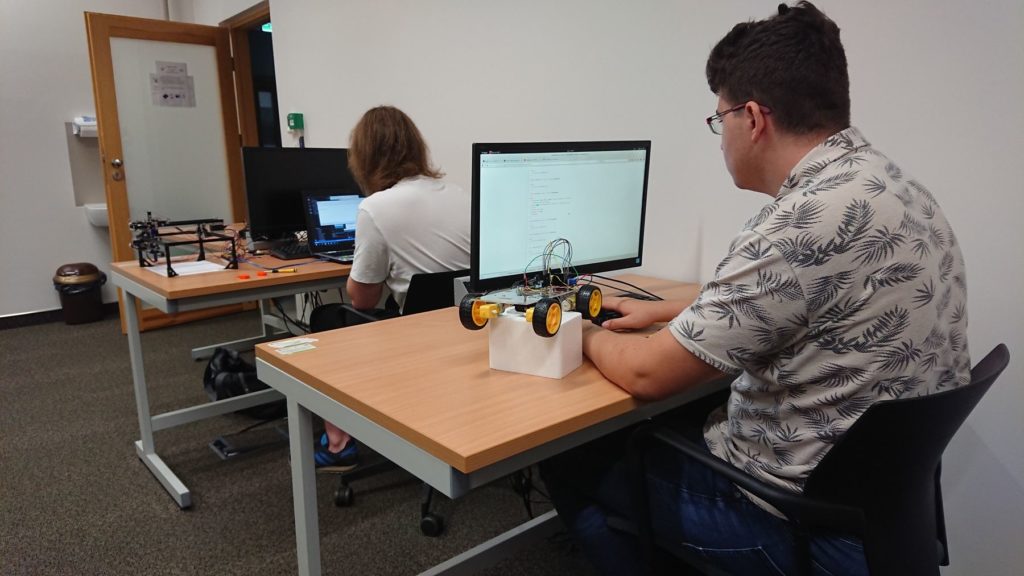
 a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa:
a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa: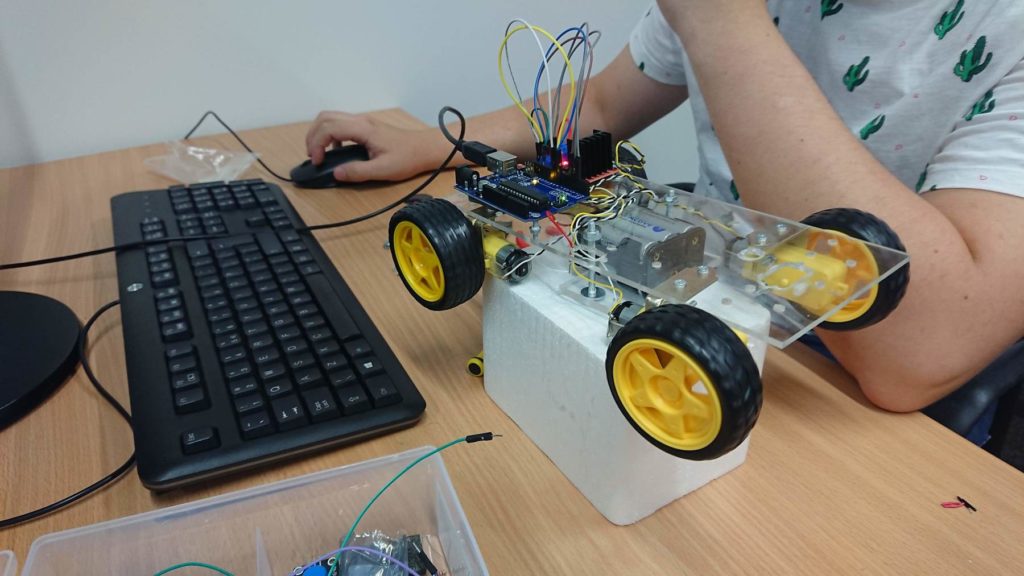 Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku
Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku 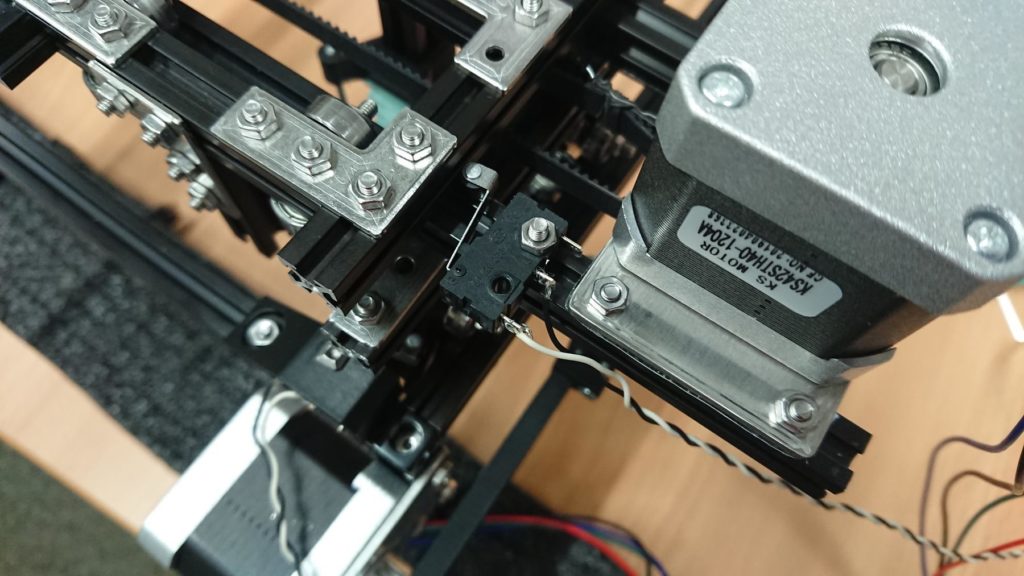
 Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na
Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na 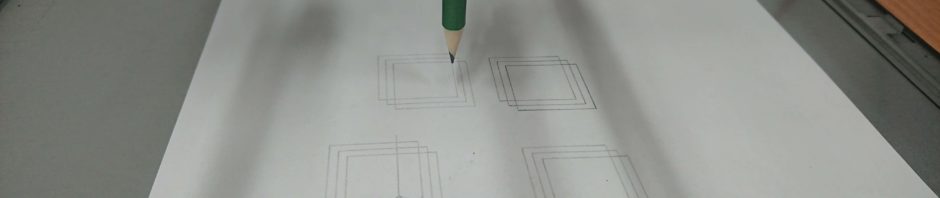
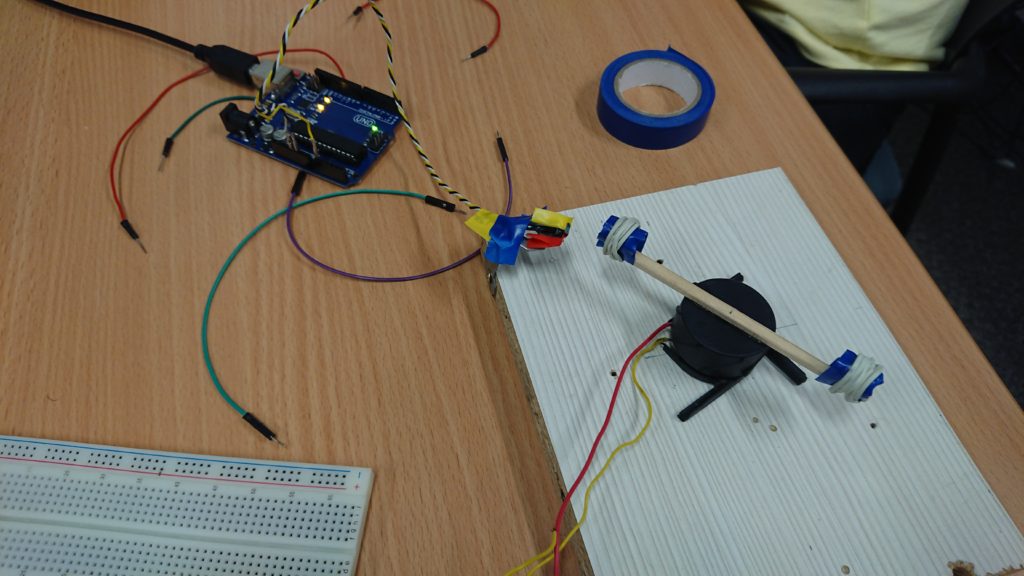
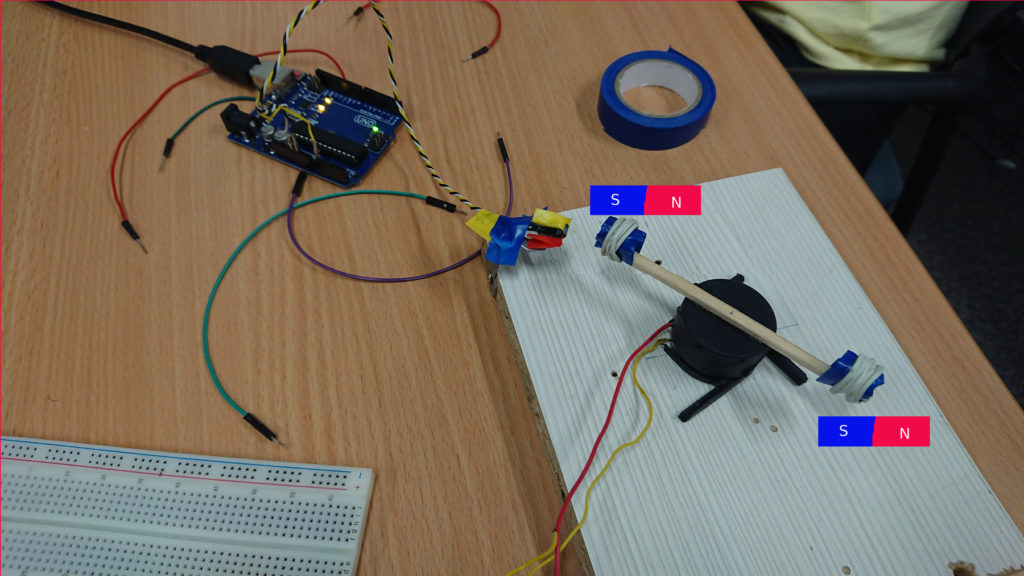 W układzie celowo zamontowano magnesy tak, by czujka SS49E „widziała” raz biegun północny (N) magnesu, a za drugim razem (gdy silniczek obróci sie o 180 stopni) biegun południowy (S). Ustawienie magnesów na końcach patyka nie jest więc przypadkowe 😉 Czujnik SS49E odczytuje zarówno biegun S jak i N (uwaga: nie wszystkie czujki pola magnetycznego, bazującego na efekcie Halla, tak mają – warto to sprawdzić przed zakupejm), dlatego widzimy dwa „piki” podczas obracania silniczka – jeden „do góry” (większe napięcie) oraz „do dołu” (napięcie mniejsze). Z dala od magnesów czujka zwraca napięcie ~2.5V informując, że wartość pola magnetycznego jest (około) zera. Poniżej wykres z Kreślarki
W układzie celowo zamontowano magnesy tak, by czujka SS49E „widziała” raz biegun północny (N) magnesu, a za drugim razem (gdy silniczek obróci sie o 180 stopni) biegun południowy (S). Ustawienie magnesów na końcach patyka nie jest więc przypadkowe 😉 Czujnik SS49E odczytuje zarówno biegun S jak i N (uwaga: nie wszystkie czujki pola magnetycznego, bazującego na efekcie Halla, tak mają – warto to sprawdzić przed zakupejm), dlatego widzimy dwa „piki” podczas obracania silniczka – jeden „do góry” (większe napięcie) oraz „do dołu” (napięcie mniejsze). Z dala od magnesów czujka zwraca napięcie ~2.5V informując, że wartość pola magnetycznego jest (około) zera. Poniżej wykres z Kreślarki
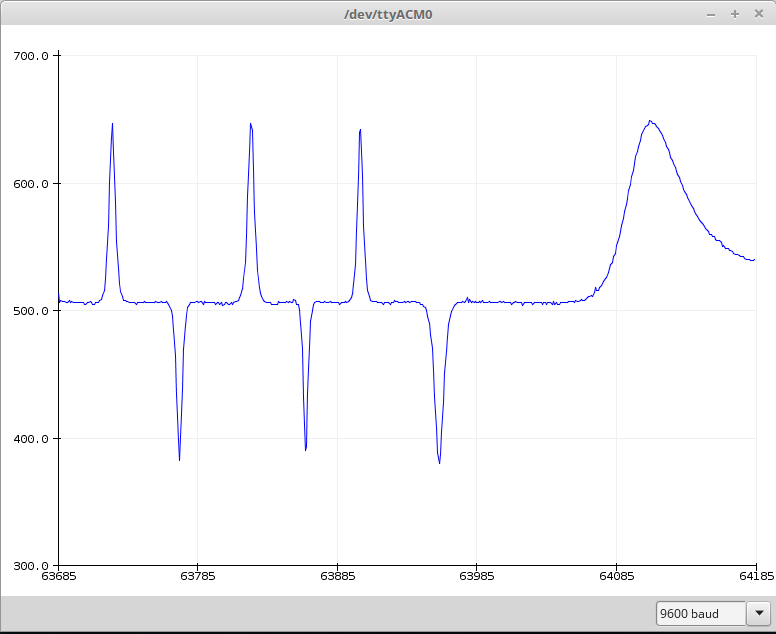 Program zliczający liczbę obrotów na sekundę (zmienna czas – aktualnie 1000ms, ale można zmienić, także przez krotność – zmienna krok). Algorytm polega na znajdowaniu maksimum i minimum napięcia – a zapisywane jest moment ich wystąpienia (do zmiennych t_1oraz t_2, odpowiednio). Różnica tych czasów do pół obrotu.
Program zliczający liczbę obrotów na sekundę (zmienna czas – aktualnie 1000ms, ale można zmienić, także przez krotność – zmienna krok). Algorytm polega na znajdowaniu maksimum i minimum napięcia – a zapisywane jest moment ich wystąpienia (do zmiennych t_1oraz t_2, odpowiednio). Różnica tych czasów do pół obrotu.
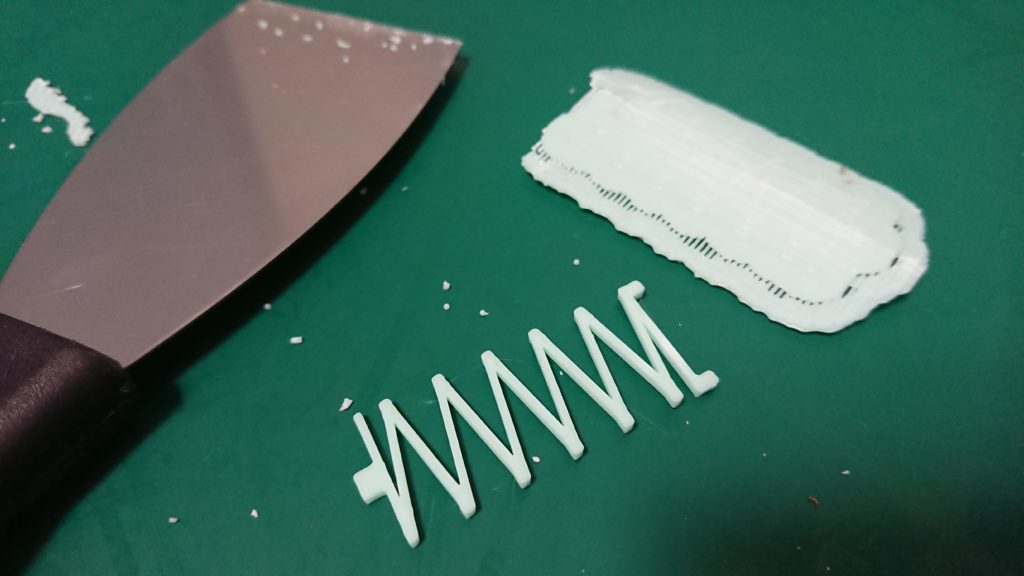
 Nowy model powinien być lepszy – bo wydrukowany z Z-Ultratu:
Nowy model powinien być lepszy – bo wydrukowany z Z-Ultratu:
 No i mamy coraz lepszą pracę Maszyny:
Więcej o projekcie Maszyny na
No i mamy coraz lepszą pracę Maszyny:
Więcej o projekcie Maszyny na 
 No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod
No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod 
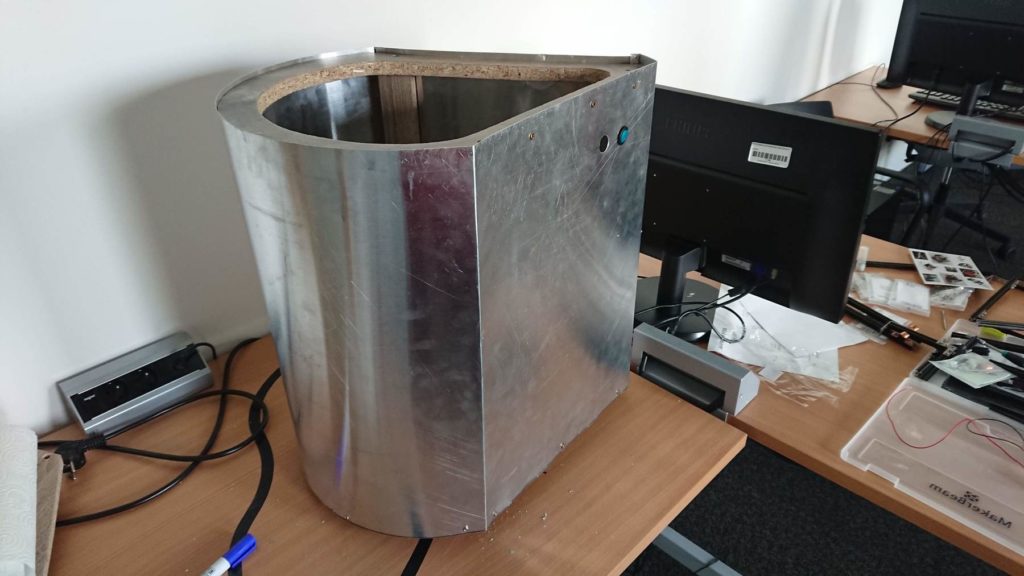
 A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
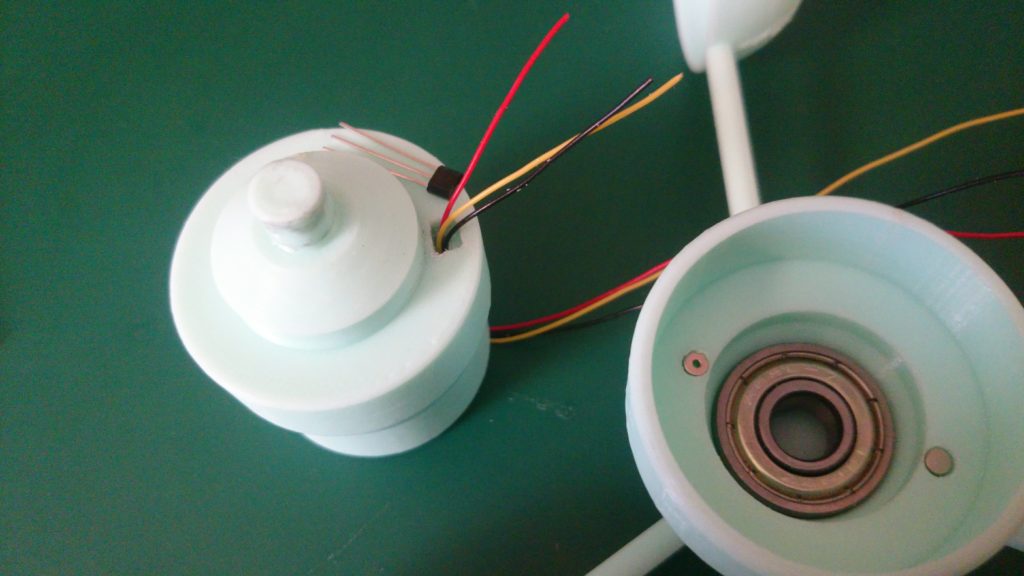
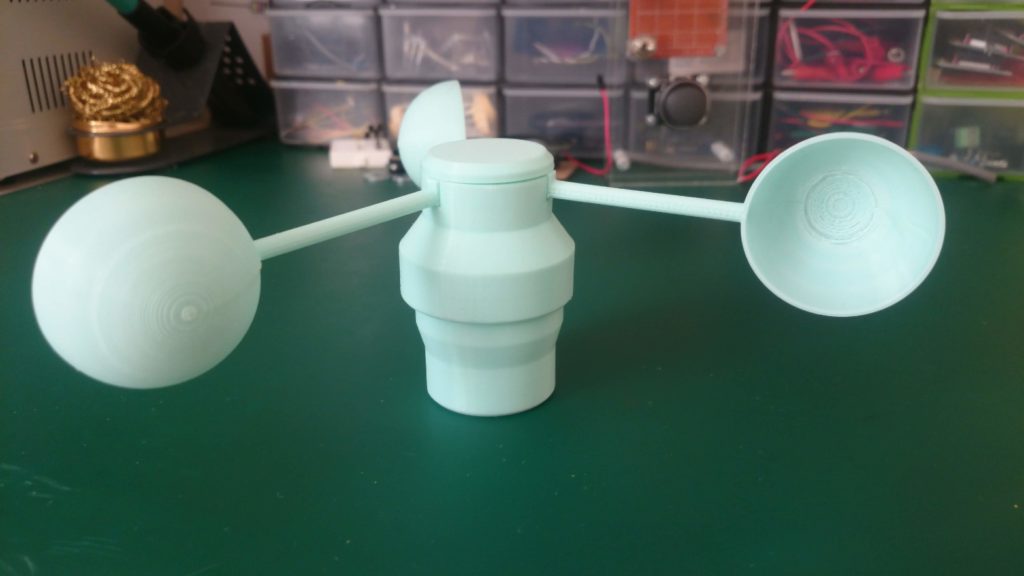 w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
 O dalszych losach tego projektu niebawem…
O dalszych losach tego projektu niebawem…
 Ciągle jest kilka kwestii do zrobienia:
Ciągle jest kilka kwestii do zrobienia:

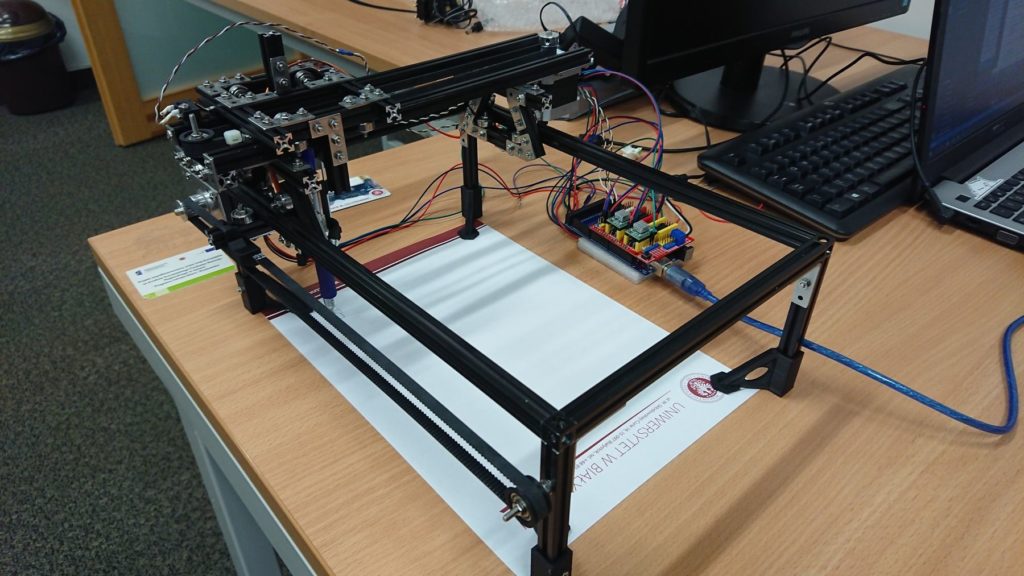
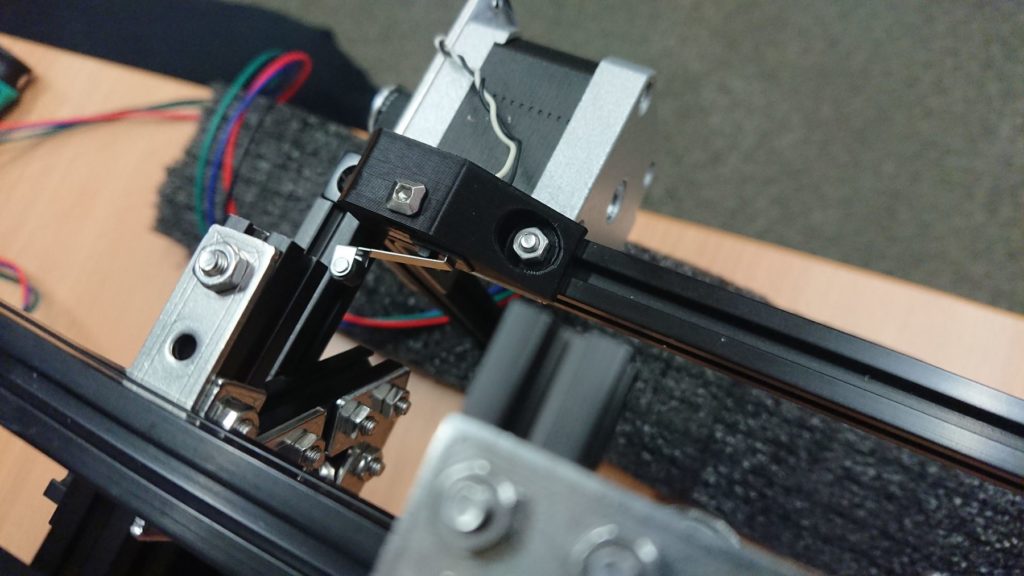
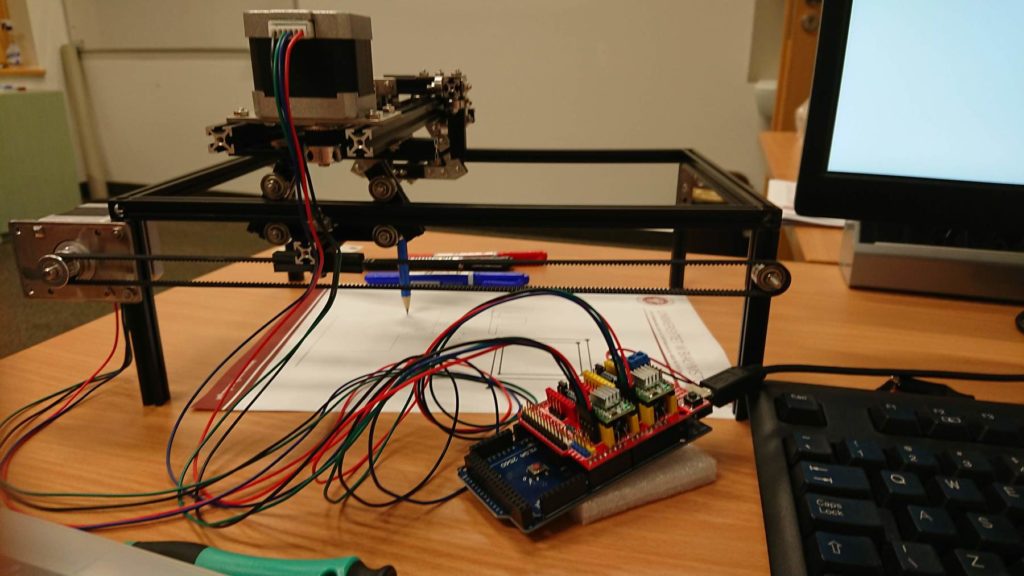
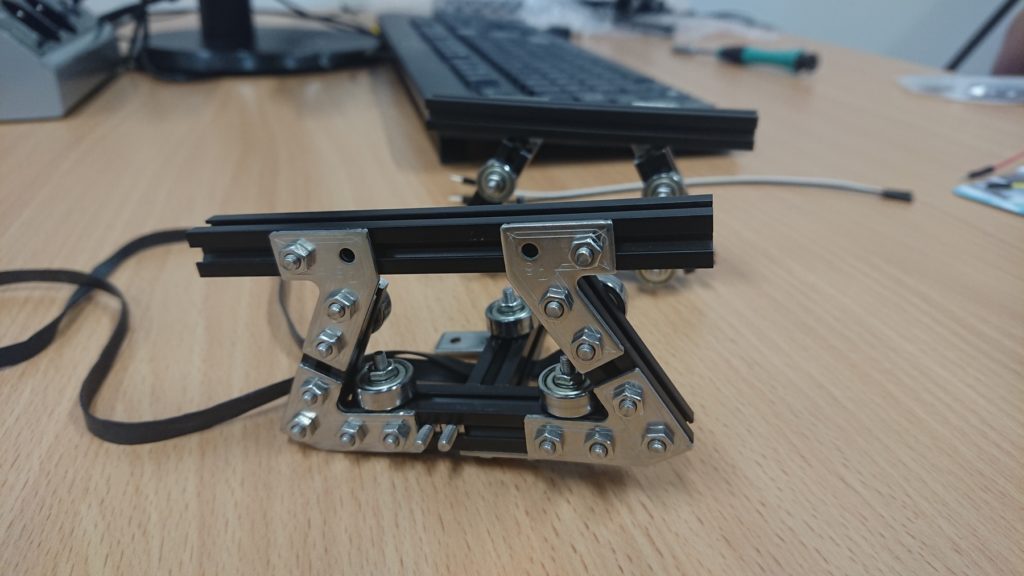
 I najważniejsze – wózki:
I najważniejsze – wózki:
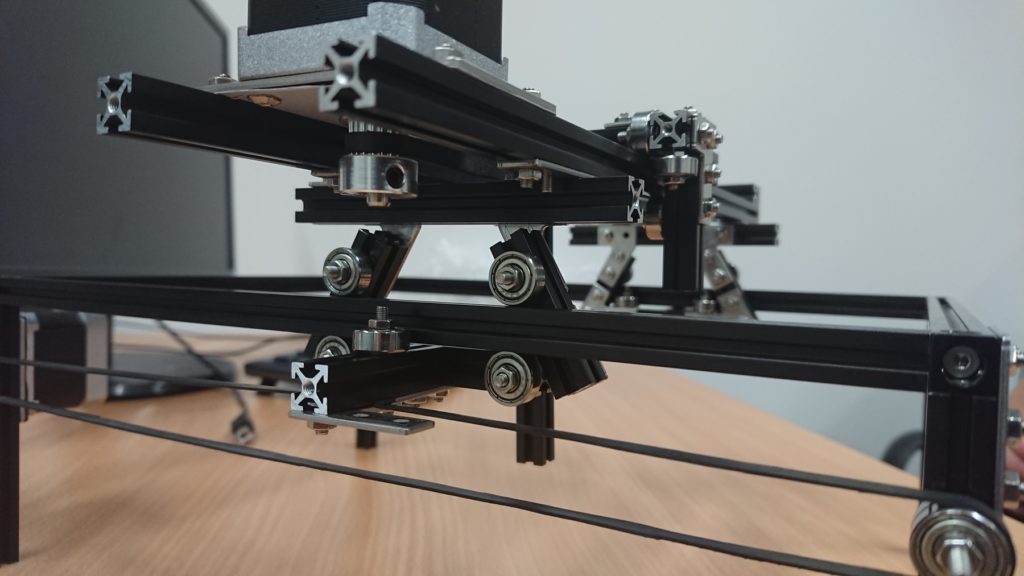 Chwilowo paski to zwykła dętka rowerowa (
Chwilowo paski to zwykła dętka rowerowa (

 A jak to działa?
Na filmie powyżej dodatkowy (tymczasowy) element – gąbki, to wyciszenie (cała konstrukcja lekko drga, a metalowe śrubki lekko dzwonią). Mamy pomysł co z robić z tym „fantem” – będzie i skuteczne, i zabawne 😉 W strylu Pana Bartka – wydrukuje się w 3D odpowiednie podkładki. Niebawem się okaże.
A teraz dwa silniki w akcji:
Nie mogliśmy się oprzeć pokusie „zainstalowania” precyzyjnego pisaka 😉 i wykonania pierwszego „precyzyjnego” rysunku:
A jak to działa?
Na filmie powyżej dodatkowy (tymczasowy) element – gąbki, to wyciszenie (cała konstrukcja lekko drga, a metalowe śrubki lekko dzwonią). Mamy pomysł co z robić z tym „fantem” – będzie i skuteczne, i zabawne 😉 W strylu Pana Bartka – wydrukuje się w 3D odpowiednie podkładki. Niebawem się okaże.
A teraz dwa silniki w akcji:
Nie mogliśmy się oprzeć pokusie „zainstalowania” precyzyjnego pisaka 😉 i wykonania pierwszego „precyzyjnego” rysunku:
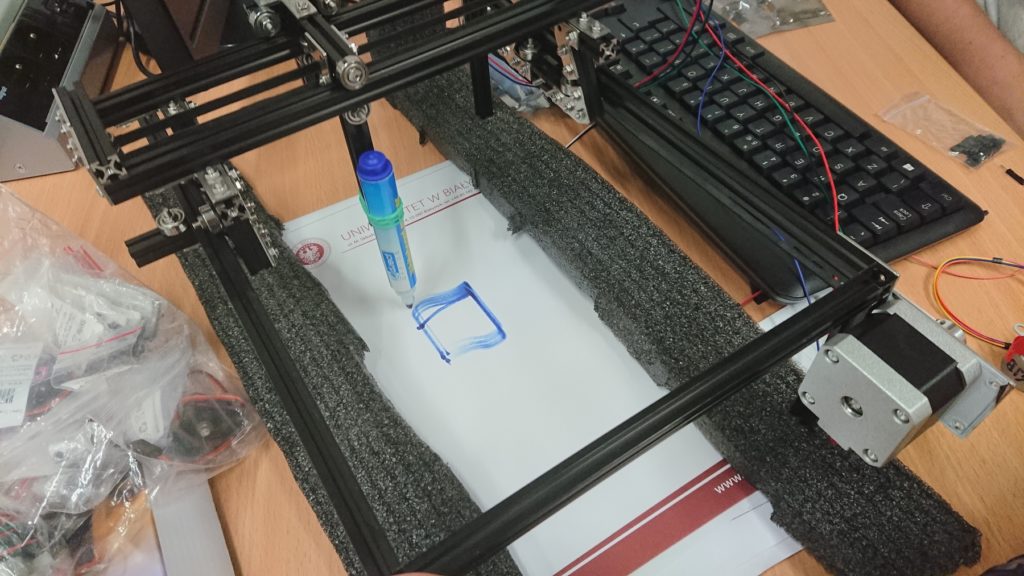 Na uwagę zasługują gradienty koloru i efektowne falki. Jak się takie rzeczy programuje – chwilowo pozostawiamy w tajemnicy 😀 Filmik
Poniżej najważniejsi gracze z prezentowanej maszyny: wózki konstrukcji Pana Bartka – gratuluję pomysłowości!
Na uwagę zasługują gradienty koloru i efektowne falki. Jak się takie rzeczy programuje – chwilowo pozostawiamy w tajemnicy 😀 Filmik
Poniżej najważniejsi gracze z prezentowanej maszyny: wózki konstrukcji Pana Bartka – gratuluję pomysłowości!

 Widać, że prace idą w (bardzo) dobrym kierunku. Niebawem kolejne etapy produkcji – wszystko aktualizowane na oddzielnej
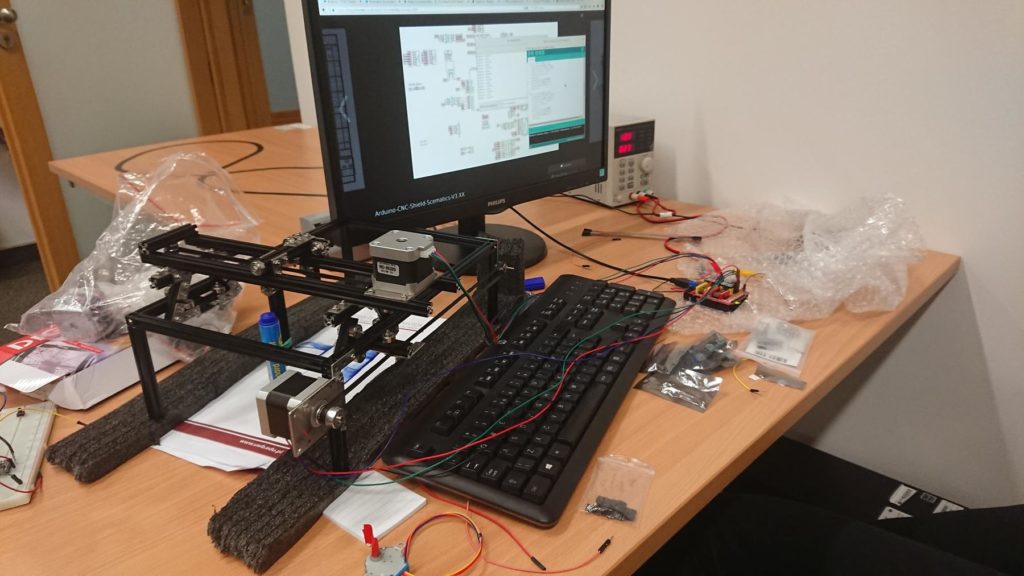
Widać, że prace idą w (bardzo) dobrym kierunku. Niebawem kolejne etapy produkcji – wszystko aktualizowane na oddzielnej  Właśnie z powodu nowego pomyłu przetestowaliśmy działanie czujki pola magnetycznego SS49E – dziecinnie proste 😉 Podłączamy do zasilania (5V z Arduino UNO) a wyjście #3 do portu analogowego.
Właśnie z powodu nowego pomyłu przetestowaliśmy działanie czujki pola magnetycznego SS49E – dziecinnie proste 😉 Podłączamy do zasilania (5V z Arduino UNO) a wyjście #3 do portu analogowego.
 Odczytywane napięcie z portu analogowego tłumaczymy na wartość pola magnetycznego zgodnie z poniższym rysunkiem (z
Odczytywane napięcie z portu analogowego tłumaczymy na wartość pola magnetycznego zgodnie z poniższym rysunkiem (z  Zaletą tego konretnego czujnika (SS49E) jest możliwość odczytywania pola z obu biegunów magnesu – czyli z biegunu półnonego i południowego. Są bowiem inne czujki, które informują nas jedynie o wartości pola z jednego bieguna, a na pole z przeciwnego bieguna są „głuche”.
Nas nie interesują wartości w mT, a raczej sama informacja zbliżenia do magnesu. No właśnie – przetesowaliśmy kilka małych (i większych) magnesów, w tym neodymowe – bardzo silne. Będzie się działo!
Zaletą tego konretnego czujnika (SS49E) jest możliwość odczytywania pola z obu biegunów magnesu – czyli z biegunu półnonego i południowego. Są bowiem inne czujki, które informują nas jedynie o wartości pola z jednego bieguna, a na pole z przeciwnego bieguna są „głuche”.
Nas nie interesują wartości w mT, a raczej sama informacja zbliżenia do magnesu. No właśnie – przetesowaliśmy kilka małych (i większych) magnesów, w tym neodymowe – bardzo silne. Będzie się działo!